基于VisionPro的颜色识别分类系统研究
时间:2023-02-02 20:00:02 来源:天一资源网 本文已影响 人 
李东升, 陈伟, 秦付军
(西华大学机械工程学院, 成都610039)
物体的颜色是其最直观、最鲜明的特征。在工业生产制造中,都需要以颜色进行产品的识别与分类,例如对蔬果分拣、药粒分类。目前一些中小型的工厂或者制药企业,依然采用人工方式进行识别与分类,工作效率低下,而且工场人力成本高[1]。工业机器人诞生以来,其应用和种类不断得到扩展,分拣机器人在工业制造领域获得了广泛应用,结合机器视觉技术,机器视觉系统应用到自动化行业,极大地提高了生产效率。通过视觉技术实现精确识别,引导机械手分类抓取具有更高的灵活度和精度。
任娟娟等[2]设计了一种基于机器视觉的物料识别、定位、抓取系统。梁赟[3]开发了结合深度学习的机器视觉在线识别与定位算法。姚应方等[4]通过机器视觉技术,利用颜色空间的变换提取了八角的颜色特征,利用极坐标变换、傅里叶变换方法提取了果形特征,探索了八角外观品质检测理论。
本文研究基于VisionPro视觉软件,联合Visual Studio开发环境、C#编程语言,选用视觉元件和机械手等硬件,搭建机器视觉系统,代替人工识别、分类不同颜色工件,减少因人工疲劳而导致误判,可以有效降低生产成本。
1.1 硬件系统组成
选用四轴直角坐标机器人搭建机台,在此平台基础上搭建视觉识别分类系统。运动控制系统选用汇川PLC,型号为H3u-3232-MT搭建运动控制模组。视觉识别系统选用相机型号为OPT-CC130-GM-04,数据接口为Gige,光学接口为C口,分辨率为1280×1024。配置计算机运行环境,以太网巨型帧传输大批量的图像数据。相机镜头选用OPT-C2514-2M,焦距为25 mm,工作距离大于180 mm,最大视场为20.1°×15.1°,镜头接口为C口,光圈(F/#)为F1.4~F16。光源选用环形光源,低角度打光。搭建图1所示视觉识别分类系统。
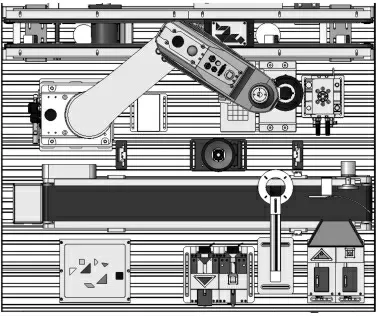
图1 视觉识别分类系统
1.2 识别分类流程
在自动识别分类之前,通过机器人示教器,对四轴机器手进行示教,将工作点位的位置信息保存到PLC当中。示教时一般采用反向示教,可以提高示教点位的精度。反向示教流程如图2所示。
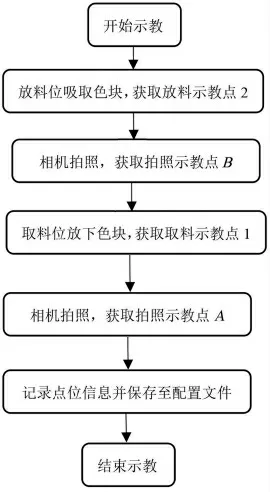
图2 示教流程图
自动识别分类流程如图3所示,在示教点A处,相机第一次拍照,视觉系统识别色块颜色、形状及角度信息;
相机拍照进行角度补偿;
轴系再次移动到示教点B处,视觉系统识别并定位与色块信息对应的放料位置,获取放料点;
机械手移动到放料点位,将色块放入指定的栽盘穴位,最后完成分类,相机拍照检测识别分类结果是否正确。
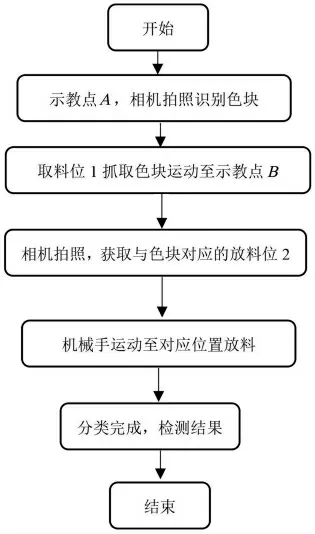
图3 自动识别分类流程图
对颜色自动识别分类技术进行了研究,设计了一种基于机器视觉的自动化颜色识别与分类系统,包括硬件选型及参数设置、相机通信及标定、视觉定位。通过康耐视内置GigeVision工具助手设置相机的IP地址,调整相机参数、光源亮度、镜头的光圈和聚焦环,获取高对比度的图像。棋盘格标定工具获取相机参数。通过九点标定,建立图像坐标系与机器人坐标系的坐标变换关系。通过VisionPro视觉工具,编写高级脚本,识别物体颜色的视觉程序。视觉颜色识别分类技术系统方案如图4所示。
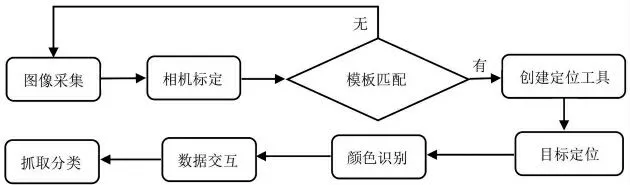
图4 视觉识别分类技术系统方案
图5所示为世界坐标系、机器人基坐标系、机械手坐标系、工件坐标系、相机坐标系之间的关系。
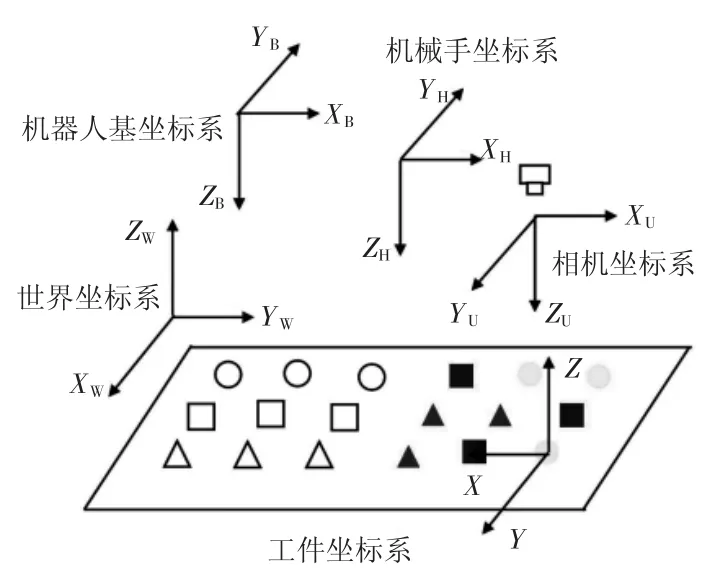
图5 视觉系统坐标关系图
3.1 相机内参标定
由于透镜制造精度及组装工艺的偏差导致原始图像的失真,造成相机和成像面切向畸变[5]。透镜本身与相机传感器平面(成像平面)或图像平面不平行而产生径向畸变。本文使用VisionPro视觉软件中的棋盘格标定工具来标定相机内参,校正切向和径向畸变,校正结果如图6所示。校正后的各对应点的RMS均方差约为0.337。
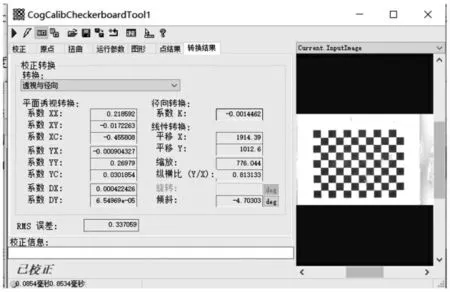
图6 相机棋盘格标定结果
3.2 相机外参标定
相机外参采用九点标定法,获得图像坐标系与机器人的运动坐标系之间的映射关系。实验使用的机器人是四轴直角坐标系机械手,相机不涉及深度信息,使用Visionpro软件视觉工具可以简化标定方法,只需标定出机器人的定位精度与运动方向。
由于机械误差及组装工艺的不同导致机器人硬件特性差异,本文对机器人的运动控制模组进行了校正。使用Cog Calib N Point To N Point Tool,通过示教器控制轴系依次运动9个点,同时运行视觉程序,抓取图像中的Mark点,将9个Mark点的坐标与机械手的坐标系建立坐标变换矩阵[6-8]。其中,相机的图像坐标系标定方向与运动控制模组的运动方向相反。相机标定时记录的9组点位如表1所示。其中未校正点坐标基于图像坐标系,已校正点坐标基于机器人坐标系。
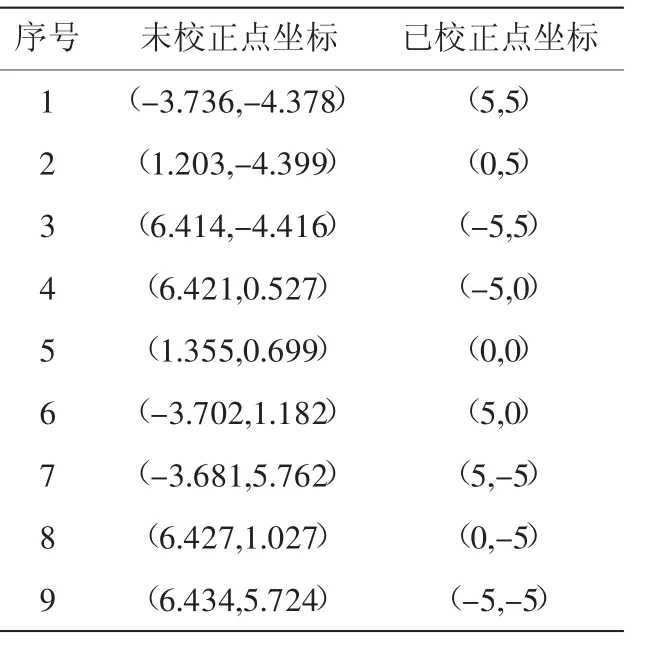
表1 九点标定的坐标数据
由于色块在栽盘中随机摆放,分类放料时需要校正角度和位置补偿。首先拍照获取色块的位置及工位角度。相机拍照完成后,视觉系统计算偏移角度,机械手第四关节进行角度补偿。
5.1 实验结果
为验证视觉识别分类系统的有效性,以色块为实验对象,尝试不同位置和角度来进行实验。进行3轮实验,总计300次颜色识别分类,实验结果如表2所示。
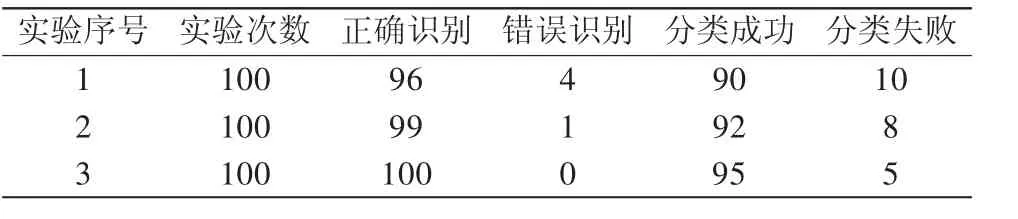
表2 实验验证数据
实验结果数据表明,第一次实验由于系统误差及环境干扰,正确识别率为98.3%,识别实验有较小的误判;
同时在补偿角度过大的情况下,由于实际旋转中心与色块中心的偏差,会引入位姿差,导致分类放料时色块碰撞到栽盘穴位边缘,分类摆放失败。
5.2 实验改进
针对补偿角度过大的情况,在第二工位下放置相机进行二次定位。下相机拍照,获取色块的水平和垂直位置偏移量。通过下相机二次拍照获取到的旋转中心到实际旋转中心的垂直分量Δy和水平分量Δx与计算旋转引入位姿差校正算法得到的垂直和水平分量相同,如图7所示。
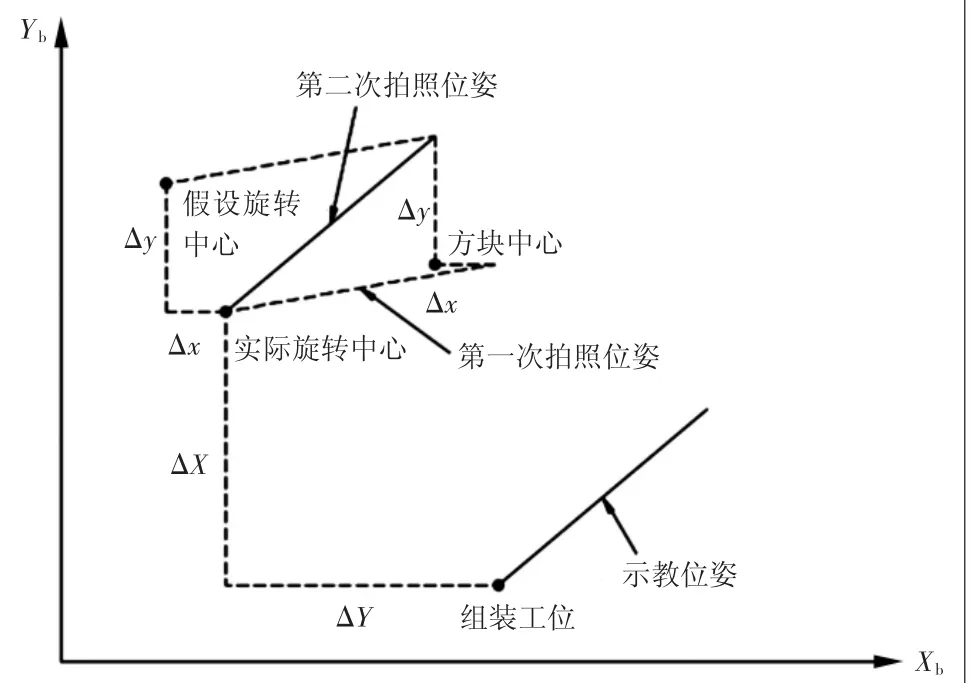
图7 旋转引入位姿差位置偏移量
采用下相机二次拍照定位的方式可以在一定范围内减小吸取时旋转中心同色块中心不在同一点所产生的误差[9]。
其中实验1、2为不使用下相机二次定位的情况,实验3为使用下相机的情况。表3实验结果数据表明,引入下相机进行二次定位可以提高工件分类摆放的准确率。不使用下相机定位时,在补偿角度过大的情况下会导致位姿差偏移,分类摆放时色块碰撞到栽盘穴位边缘,造成错误摆放。通过下相机拍照进行二次定位,使得分类摆放的准确率得到提升。
实验基于Visual Studio 软件,通过C#和VisionPro视觉软件联合编程、以太网与工控机通信,控制PLC进行运动控制,视觉系统视野为60 mm×40 mm的情况下,单相素分辨率达到0.125 mm/Pixel。为满足系统的稳定性,使用3个像素宽度表示0.125 mm,组装硬件搭建机器视觉平台,设计了一种基于机器视觉技术的自动颜色识别与分类系统。由表2实验数据可知,光照干扰及一些噪声使实验出现错误识别,后续针对错误进行改进后,本系统的颜色识别率达到98.3% 以上,由表3实验数据可知,引入下相机二次定位,分类系统具有更好的稳定性、可靠性,可以实现自动分类工作。
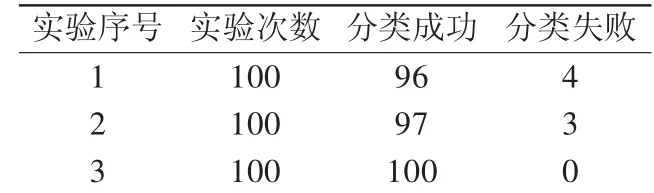
表3 实验验证数据
猜你喜欢 色块标定坐标系 独立坐标系椭球变换与坐标换算导航定位学报(2022年2期)2022-04-11轻卡前视摄像头的售后标定汽车电器(2021年8期)2021-08-24一种轻卡前视单目摄像头下线标定方法汽车电器(2021年7期)2021-08-04使用朗仁H6 Pro标定北汽绅宝转向角传感器汽车维修与保养(2020年11期)2020-06-09多元游牧小资CHIC!ELEGANCE(2019年24期)2019-08-15CT系统参数标定及成像—2智富时代(2019年2期)2019-04-18CT系统参数标定及成像—2智富时代(2019年2期)2019-04-18坐标系背后的故事数学大世界(2018年1期)2018-04-12三角函数的坐标系模型考试周刊(2018年15期)2018-01-21求坐标系内三角形的面积中学生数理化·七年级数学人教版(2017年4期)2017-07-08 相关关键词: 内容识别,告别单一 合同智能识别比对 合同OCR识别 合同智能识别 ocr智能识别在信贷








